 13/07/2021 - Por enquanto, é apenas uma manga. Mas eles estão trabalhando nisso. Uma equipe do Instituto de Tecnologia de Massachusetts desenvolveu um braço robótico que pode deslizar um braço de um colete em uma pessoa. E isso é mais impressionante do que pode parecer inicialmente. Alguns anos atrás, eu estava comendo em um refeitório de uma casa de repouso quando uma mulher na casa dos oitenta anos me chamou e me pediu para ajudar a vestir seu cardigã.
13/07/2021 - Por enquanto, é apenas uma manga. Mas eles estão trabalhando nisso. Uma equipe do Instituto de Tecnologia de Massachusetts desenvolveu um braço robótico que pode deslizar um braço de um colete em uma pessoa. E isso é mais impressionante do que pode parecer inicialmente. Alguns anos atrás, eu estava comendo em um refeitório de uma casa de repouso quando uma mulher na casa dos oitenta anos me chamou e me pediu para ajudar a vestir seu cardigã.
Eu disse que não havia problema, então agarrei uma manga e tentei colocá-la em seu braço. Foi quando percebi que seu corpo havia endurecido ao longo dos anos e suas costas estavam curvadas. Eu não sabia como alinhar a geometria entre o braço e a manga sem machucá-la.
“Você não vai me quebrar!” ela brincou, lendo minha indecisão. E então dobrei seus membros e ombros com mais força do que pensava ser seguro. Depois de um minuto de persuasão nervosa, seu cardigã estava vestido e ela voltou para o almoço. Este trabalho foi muito mais difícil do que eu esperava e torna as últimas pesquisas do MIT muito mais significativas. A equipe do MIT treinou um robô para colocar com segurança um colete em um braço humano, o que é um passo inicial, mas importante, na criação de um robô que poderia vestir completamente uma pessoa idosa ou com deficiência. Os robôs conseguem se vestir sozinhos há uma década. Tal conquista só é possível porque um robô conhece as dimensões de seu próprio corpo e exatamente o que pretende fazer a seguir. Para um robô vestir outra pessoa é um desafio totalmente diferente, porque exige que ele intua o próximo movimento de outra pessoa, para que o robô não cometa um erro que possa torcer um pulso ou deslocar um cotovelo.
“Neste trabalho, nos concentramos em uma técnica de planejamento”, explica Shen Li, doutorando no Interactive Robotics Group do MIT e autor do novo artigo publicado na Science and Systems. “Os robôs preveem o movimento humano e, em seguida, projetam um plano seguro com base na previsão. Se eu vestir uma criança ou um adulto, eles podem ter reações diferentes. Então você tem que prever o que eles vão fazer.” Essa previsão, no cérebro humano, é um processo invisível. Não entendemos completamente como uma pessoa aborda uma situação como deslizar uma manga de camisa em outro humano.
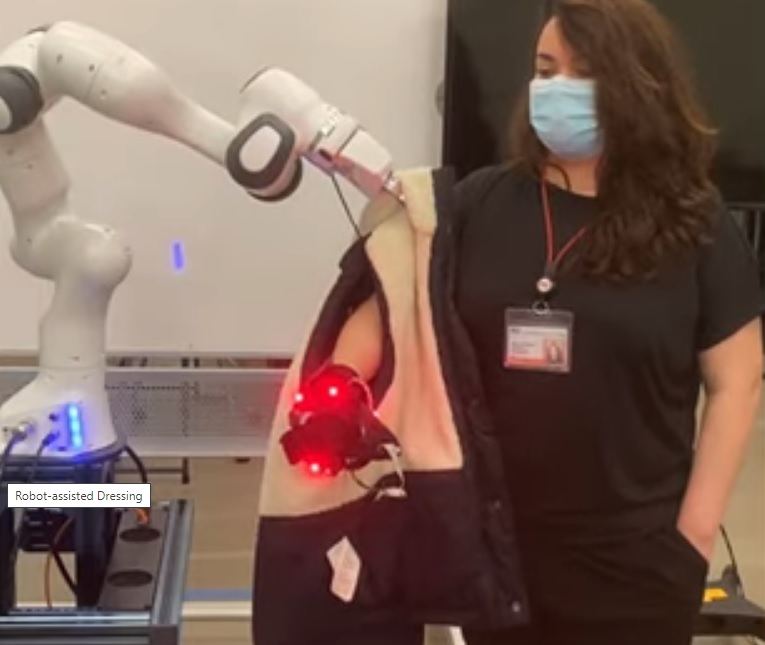
Li e seus colaboradores pegaram um braço robótico de estoque e o encaixaram com um rastreador 3D, que pode ver o movimento da pessoa esperando para ser vestida. Seu avanço está no software, que não apenas reconhece a posição de alguém no momento, mas considera como eles podem se mover em seguida - para vesti-los com sucesso e não prejudicá-los no processo.
Leia também - Um novo satélite pode espiar dentro de alguns edifícios, de dia ou de noite
Para antecipar um dos, digamos, 100 movimentos possíveis diferentes, o sistema precisa prever os 100 movimentos possíveis primeiro e criar um caminho que garanta a segurança de uma pessoa, não importa como ela realmente se mova. “Não estamos apenas prevendo o movimento humano mais provável, mas todo o conjunto humano incerto do futuro”, diz Li, observando que essa é uma abordagem especialmente conservadora que pode significar que você está se vestindo em um ritmo de caracol. No entanto, com o tempo, o software aprende com a pessoa que se veste. Ele pode lentamente desconsiderar os movimentos que uma pessoa nunca faz, reduzindo a lista de possíveis para algo mais provável e prático.
“No início, o robô pode ser muito conservador, muito lento”, diz Li. “Depois que o robô tem mais certeza sobre o humano [é mais rápido].” Mesmo quando o robô acelera, ele nunca usa um nível de força que possa ferir alguém, e o software é treinado para responder a movimentos surpreendentes a qualquer momento, como se você pegasse um controle remoto de TV e começasse a mudar de canal enquanto se vestia. Para as próximas etapas da pesquisa, Li gostaria de adicionar uma manga completa ao colete e desenvolver o software para acomodar o atrito extra de puxar uma roupa para um apêndice. Depois que esse passo for descoberto, puxar uma segunda manga, ou um par de calças, será mais fácil.
A outra grande falha nesta pesquisa é que o robô atual começa com um punho humano já puxado por um buraco na manga, então a equipe gostaria de resolver esse problema também, vestindo um humano desde as primeiras etapas do processo. Li observa que as enfermeiras geralmente pegam a mão de uma pessoa e a enfiam na manga, sugerindo que, em última análise, um segundo braço robótico pode tornar essa tarefa muito mais fácil. Isso pode soar como pequenos passos de desenvolvimento, em um mundo onde os modelos de aprendizado de máquina parecem resolver problemas enormes, como visão computacional e reconhecimento de objetos da noite para o dia. Li não hesita quando sugiro que podemos estar a uma década treinando um robô para vestir e despir alguém em sua totalidade, mas observa que é notavelmente difícil trabalhar com humanos em vez de coisas.
“Como você desenvolve um algoritmo para aprender [comportamento humano] de forma eficiente?” Li pergunta. “Você não pode simplesmente ter um humano lá fazendo a tarefa [um milhão de vezes]'”
Fonte: https://www.fastcompany.com/